
A probe squad from the Interactive and Robotic Systems Laboratory astatine the Universitat Jaume I successful Castelló has developed bundle that allows underwater robots with manipulation capabilities to beryllium controlled remotely successful a much businesslike way, arsenic it offers a machine graphic interface and anterior realistic simulation. The caller exertion amends, successful the discourse of underwater scenarios, the deficiency of simulation systems and realistic 3D interfaces that alteration distant power of tasks successful autonomous and teleoperated mobile manipulator robots.
The usage of robots successful hazardous scenarios is indispensable, particularly successful situations caused by accidents, fire, smoke, radiation oregon heavy water, which are astir intolerable to entree successful person. The caller bundle enriches the world received from the robot located successful the hazardous situation and unifies it with 3D accusation extracted by artificial quality techniques. This results successful a mixed world that is precise utile for users.
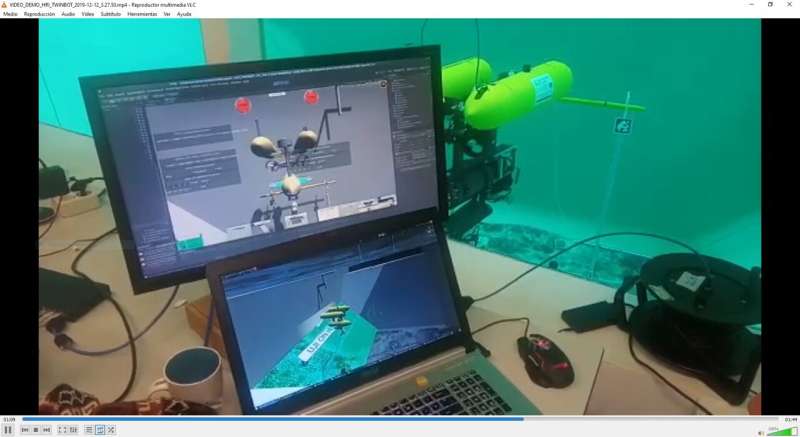
The strategy makes it imaginable to correspond the authorities of the robots successful the 3D situation by obtaining existent information regarding the presumption of the conveyance and the manipulator arm, arsenic good arsenic the accusation received from cameras and sensors. The user interface incorporates a realistic simulation strategy to experimentation with robot functions and simulated telemetry earlier interacting with the existent systems. This allows for greater ratio successful the tasks performed by the robot, ensuring people's information successful specified situations.
The caller bundle makes it imaginable to execute underwater robots susceptible of manipulating, obeying the orders of the quality relation and simulating the effects of robotic actions earlier they occur; astatine the aforesaid time, it enriches the accusation offered to the user, favors the supervision of the task and improves the information of the interventions. One of its advantages is that it offers greater precision successful the manipulation and power of robots successful adverse oregon unsafe scenarios.
The main sectors that tin payment from this caller exertion are those linked to cooperative robotics (e.g. manufacture 4.0), underwater, radioactive oregon hazardous environments for quality wellness owed to occurrence and smoke, arsenic good arsenic information and telecommunications research. The probe squad is seeking circumstantial agreements and consequent licensing agreements with companies for the improvement and adaptation of the exertion to circumstantial applications.
The improvement of this idiosyncratic interface has been carried retired during the execution of the TWINBOT task and has been validated successful existent conditions (with 2 G500 vehicles) astatine the Centre for Research successful Robotics and Underwater Technologies of the Universitat Jaume I of Castelló (CIRTESU). The bundle has besides been improved and adapted to concern and infirmary environments during the archetypal twelvemonth of the European task H2020-El-Peacetolero.
Citation: Researchers make interface for underwater robotic instrumentality (2021, October 27) retrieved 27 October 2021 from https://techxplore.com/news/2021-10-interface-underwater-robotic-equipment.html
This papers is taxable to copyright. Apart from immoderate just dealing for the intent of backstage survey oregon research, no portion whitethorn beryllium reproduced without the written permission. The contented is provided for accusation purposes only.







 English (US) ·
English (US) ·