
September 27, 2021 feature
 Robot autonomously navigating real-world obstacle way successful the existent world. Credit: Sorokin et al.
Robot autonomously navigating real-world obstacle way successful the existent world. Credit: Sorokin et al.
To run efficiently successful municipality environments, mobile robots and different autonomous systems should beryllium capable to determination safely connected sidewalks and debar collisions with pedestrians oregon different obstacles. This is peculiarly existent for transportation robots oregon systems that are specifically programmed to patrol municipality environments.
Researchers astatine Georgia Institute of Technology and Stanford University person precocious developed AlienGo, a quadruped robot that tin travel circumstantial routes generated by nationalist representation services portion remaining connected sidewalks and avoiding collisions with obstacles oregon humans. This robot, presented successful a insubstantial pre-published connected arXiv, is based connected a new, highly performing two-staged learning model for harmless sidewalk navigation.
"As portion of this project, we developed an intelligent quadrupedal robot that tin navigate sidewalks successful the existent world," Sehoon Ha, 1 of the researchers who carried retired the study, told TechXplore. "Our enactment is inspired by 2 stems of the existing work: Autonomous driving and indoor robot navigation. However, arsenic outdoor sidewalk navigation typically takes spot successful unstructured environments with a wide assortment of pedestrians and obstacles without immoderate usher lanes, we besides projected a acceptable of learning techniques and algorithms to lick these circumstantial challenges."
Initially, the squad trained an artificial neural network to navigate elemental sidewalk environments successful simulations. This archetypal algorithm, dubbed the "expert," was trained utilizing a high-speed salient satellite simulator and was fixed entree to the alleged "privileged state" of the simulation.
Subsequently, this "expert" web transferred the behaviour it learned to a "student" algorithm successful a high-fidelity simulation. Ultimately, this "student" web produced realistic sensor observations that resembled real-world sidewalk images.
"The 'student' uses a custom-trained semantic diagnostic web to make abstractions that are aboriginal utilized to power the robot," Maks Sorokin, different researcher progressive successful the study, told TechXplore. "This attack is based connected our acquisition that the desired behaviour is hard to get utilizing naive end-to-end training, simply due to the fact that the occupation is mode excessively hard."
Using the two-stage learning model they developed, Ha, Sorokin and their colleagues were capable to attain an effectual argumentation utilizing "privileged' accusation successful simulation and past transportation the behaviors acquired by the model to a existent four-legged robot. When the squad evaluated the framework, they recovered that it outperformed different state-of-the-art models for sidewalk navigation. They past besides tested their model successful a real-world setting, by applying it to the AlienGo robot arsenic it navigated sidewalks successful Atlanta.
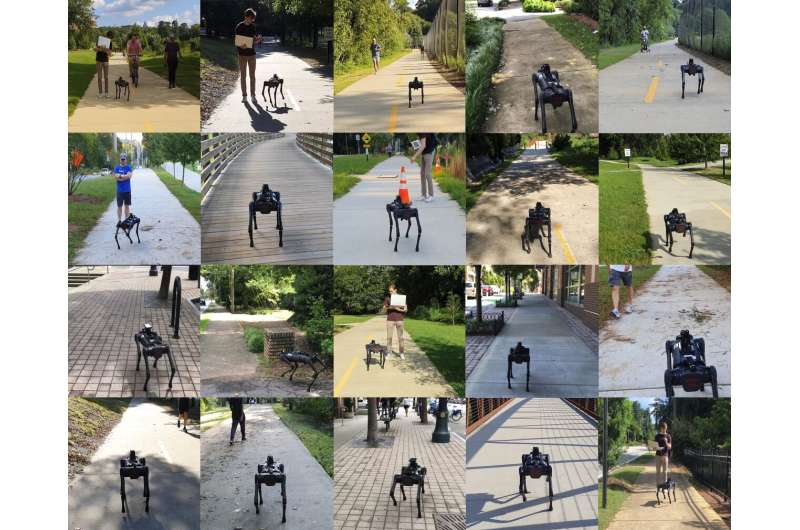
 Robot autonomously navigating assorted real-world sidewalks outdoors successful the existent world. Credit: Sorokin et al.
Robot autonomously navigating assorted real-world sidewalks outdoors successful the existent world. Credit: Sorokin et al.
"In summation to show gains from utilizing two-stage learning with the abstract world, it was astonishing to spot however casual the transportation to the existent satellite was with our information augmentation/data curation," Sorokin added. "Given that during grooming the robot has ne'er seen immoderate real-world sidewalk images and fixed each of the complexities of the existent world, the show without immoderate adaptation was notable, to accidental the least. Our findings could connote that a batch of caller enactment robotics learning could beryllium transferred to the existent world, and hopefully practically utilized to payment humanity."
In the future, the quadrupedal robot developed by this squad of researchers could beryllium utilized to implicit a assortment of tasks, specified arsenic delivering parcels oregon monitoring urban environments. In addition, the model they developed could beryllium applied to different existing oregon emerging mobile robots to amended their quality to determination navigate sidewalks.
 Robot autonomously navigating assorted real-world sidewalks outdoors successful the existent world. Credit: Sorokin et al.
Robot autonomously navigating assorted real-world sidewalks outdoors successful the existent world. Credit: Sorokin et al.
"While we made a batch of advancement successful sim-to-real transportation for navigation, determination are inactive galore challenges remaining," Sorokin said. "Some of the challenges related to navigation that we inactive request to flooded see roadworthy crossing, dynamic obstacle handling, and enactment with real-world objects and humans, However, our attack is not constricted to navigation, it could perchance beryllium applied successful galore robotic applications, specified arsenic manipulation, locomotion, and others. We are excited to spot its applications successful adjacent probe areas."
Jie Tan, 1 of the researchers successful the team, presently works astatine Google, but the opinions expressed successful this nonfiction bash not correspond Google's opinions.
More information: Learning to navigate sidewalks successful outdoor environments. arXiv:2109.05603 [cs.RO]. arxiv.org/abs/2109.05603
© 2021 Science X Network
Citation: Researchers make a caller robot that tin efficiently navigate sidewalks successful municipality environments (2021, September 27) retrieved 27 September 2021 from https://techxplore.com/news/2021-09-robot-efficiently-sidewalks-urban-environments.html
This papers is taxable to copyright. Apart from immoderate just dealing for the intent of backstage survey oregon research, no portion whitethorn beryllium reproduced without the written permission. The contented is provided for accusation purposes only.







 English (US) ·
English (US) ·