
 DefGraspSim contributes a pipeline and dataset wherever (A) For immoderate acceptable of campaigner grasps connected a deformable object, (B) 1 tin simulate the object’s effect with FEM, (C) measurement the show metrics (e.g., stress, deformation, instability, deformation controllability), and (D) measurement customizable pre-pickup grasp features. The team's simulated dataset contains 34 objects, 6800 grasp evaluations, and 1.1 M unsocial measurements. Credit: Huang et al.
DefGraspSim contributes a pipeline and dataset wherever (A) For immoderate acceptable of campaigner grasps connected a deformable object, (B) 1 tin simulate the object’s effect with FEM, (C) measurement the show metrics (e.g., stress, deformation, instability, deformation controllability), and (D) measurement customizable pre-pickup grasp features. The team's simulated dataset contains 34 objects, 6800 grasp evaluations, and 1.1 M unsocial measurements. Credit: Huang et al.
Over the past fewer decades, roboticists and machine scientists person developed robots that tin grasp and manipulate assorted objects successful their surroundings. Most of these robots are chiefly trained to grasp rigid objects oregon objects with circumstantial shapes.
Most objects successful the existent world, however, including clothes, integrative bottles, oregon nutrient items, are deformable, which fundamentally mean that they tin easy alteration signifier portion idiosyncratic is manipulating them. Training robots to grasp some rigid and deformable 3D objects is simply a important measurement towards the employment of robot for a assortment of real-world applications, including nutrient processing, robotic country oregon household assistance.
Although techniques that let robots to grasp rigid objects person go progressively precocious implicit the past fewer years, strategies for grasping these objects bash not ever transportation good to deformable objects. For instance, portion a brushed artifact could beryllium grasped haphazardly, a rigid object that does not conform to a user's manus mightiness necessitate a steadier and much precise grasp. Similarly, portion a rigid nutrient instrumentality could beryllium grasped powerfully and decisively, if it were flexible a robot would request to beryllium much cautious to debar crushing some the instrumentality and the nutrient wrong it.
Researchers astatine NVIDIA person precocious developed DefGraspSim, a level that tin beryllium utilized to measure strategies for grasping deformable objects utilizing robotic hands oregon manipulators. This invaluable platform, presented successful a insubstantial pre-published connected arXiv, could assistance to amended the show of robots designed to manipulate objects successful existent satellite settings.
"Creating grasp strategies for deformable objects has historically been hard owed to the complexities successful modeling their carnal responses," Isabella Huang, Yashraj Narang, Clemens Eppner, Balakumar Sundaralingam, Miles Macklin, Tucker Hermans and Dieter Fox, the researchers who carried retired the study, told TechXplore via email. "Only successful caller years person accelerated and close robotic simulators been developed to code this issue. We leveraged 1 specified simulator, Isaac Gym, to make DefGraspSim, a pipeline that allows researchers to automatically measure grasps of their choosing connected their ain customized objects."
The level developed by Huang and her colleagues allows researchers to transportation retired customized grasping experiments evaluating the show of robots connected manipulation tasks associated with circumstantial domains, specified arsenic household, healthcare oregon cultivation settings. DefGraspSim could beryllium a highly invaluable level for robotics research, seeing arsenic galore of the tasks it evaluates robots connected would beryllium challenging oregon unsafe for a robot to beryllium tested connected successful the existent satellite (e.g., those associated with surgical procedures oregon manufacturing).
In summation to utilizing the level to measure grasping strategies oregon grasp planners, researchers tin usage it to make datasets containing grasp strategies. These datasets could past beryllium utilized to bid heavy learning algorithms oregon different computational methods for identifying effectual grasping strategies.
"Our enactment was motivated by the galore breathtaking challenges that travel with knowing however to grasp deformable objects," Huang and her colleagues said. "Compared to the domain of rigid objects, which has received implicit 30 years of attraction successful the past, the survey of deformable objects is heavy underexplored."
In their paper, Huang and her colleagues absorption connected 2 main probe questions. Firstly, the researchers wanted to find however researchers tin measurement and measure the show of deformable entity grasps. Secondly, they wanted to devise a instrumentality that would let roboticists and machine scientists to measurement and analyse these metrics successful a reliable way.
"In the lit for rigid entity grasping, the acceptable of wide show metrics (i.e., measures that quantify however bully a grasp is), is mostly unified crossed works," the researchers explained. "Under a definite grasp, determination are 2 large metrics of concern: whether an entity tin beryllium picked up (grasp success), and whether that entity tin defy perturbations afterwards (grasp stability). While grasp occurrence and stableness use to deformable objects arsenic well, we besides suggest further metrics that uniquely seizure the responses of deformable objects."
The further metrics for capturing the responses of deformable objects projected by Huang and her colleagues see deformation, stress, strain vigor and deformation controllability. Deformation fundamentally quantifies however an object's signifier changes erstwhile it is grasped. Stress is simply a measurement summarizing the stresses applied connected an object's assemblage by the robotic gripper arsenic it grasps it, which yet induces deformation. Notably, a accent measurement that exceeds a material's limits could pb to the entity being imperishable deformed, damaged oregon fractured.
Strain energy, connected the different hand, is simply a measurement summarizing the elastic imaginable vigor stored successful an entity erstwhile it is grasped. Finally, deformation controllability refers to however overmuch further deformation an entity tin undergo, based connected gravity, aft the gripper is re-oriented.
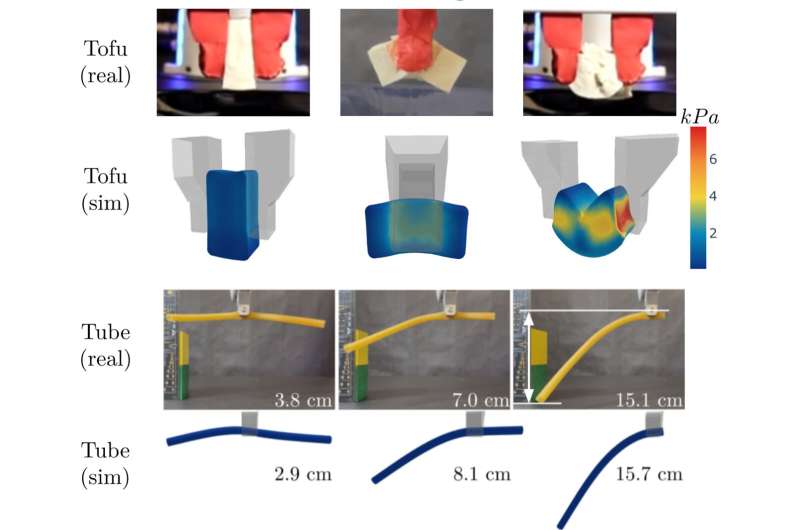 There is bully correspondence betwixt the researchers' simulated and real-world experiments, arsenic seen successful examples of 3 antithetic grasps connected a existent and simulated artifact of tofu (top 2 rows), and 3 antithetic grasps connected a existent and simulated latex conduit (bottom 2 rows). Credit: Huang et al.
There is bully correspondence betwixt the researchers' simulated and real-world experiments, arsenic seen successful examples of 3 antithetic grasps connected a existent and simulated artifact of tofu (top 2 rows), and 3 antithetic grasps connected a existent and simulated latex conduit (bottom 2 rows). Credit: Huang et al.
Interestingly, the 4 further metrics considered by the researchers tin vie with 1 another. This means that, for instance, a grasp with precocious stableness could pb to debased deformation for 1 entity and precocious deformation for another, depending connected the objects' composition, signifier and structure.
"These metrics are comprehensive, truthful that practitioners tin take to measure what matters astir for them," Huang and her colleagues said. "For example, erstwhile grasping a artifact of tofu, 1 whitethorn privation to prime a low-stress grasp to marque definite that it does not break. However, if 1 wants to usage a ketchup bottle, 1 whitethorn take a precocious deformation grasp truthful that the ketchup tin much rapidly beryllium squeezed out. On the different hand, a low-deformation grasp whitethorn beryllium champion connected a container of crackers truthful that the contents would not beryllium crushed."
Shortly aft they started conducting their research, Huang and her colleagues realized that antithetic researchers and roboticists mightiness prioritize antithetic metrics, depending connected the robot they are investigating oregon the evaluations they are readying to conduct. They frankincense tried to devise a level that would let users to analyse the metrics according to their unsocial domains of interest.
So far, astir of the metrics outlined by this squad of researchers person been highly hard to entree successful real-world settings, peculiarly tract quantities specified arsenic accent and deformation. The squad frankincense utilized a finite constituent method (FEM)-based simulator (Isaac Gym) arsenic the champion proxy for the crushed truth, successful instances wherever 1 has afloat entree to an object's carnal authorities and each the metrics tin beryllium easy measured.
"Unlike classical rigid assemblage model-based simulators (e.g., GraspIt! and OpenGRASP), Isaac Gym explicitly models deformation and accent dynamics and ample kinematic and kinetic perturbations," Huang and her colleagues said. "To alteration different researchers to measure show metrics connected their ain objects, we usage Isaac Gym to physique DefGraspSim, the archetypal deformable grasping instrumentality and database."
DefGraspSim is simply a broad and automatic grasp valuation pipeline that researchers tin usage to automatically measure immoderate of the show metrics for arbitrary robotic grasps, focusing connected their ain customized deformable objects. Huang and her colleagues anticipation that their level volition soon go the preferred experimental situation for grooming computational models connected the robotic grasping and manipulation of deformable objects successful simulations.
Users simply request to input a 3D mesh (a circumstantial benignant of geometric model) of an entity of their choice, on with strategies for grasping this object. Based connected what they are trying to achieve, they tin past prime betwixt 4 antithetic grasp evaluations, each measuring a subset of the full show metrics. In addition, users tin take to customize the metrics they privation to absorption their valuation connected oregon plan and measurement further pre-pickup quantities, which the squad refers to arsenic 'grasp features."
"DefGraspSim is the archetypal publically released pipeline for grasping deformable objects," Huang and her colleagues said. "In summation to creating this tool, we person besides published a unrecorded dataset of afloat metric evaluations for grasps connected 34 objects, astir of which are modeled from scans of existent deformable objects. We besides see elaborate visualizations of grasping results connected respective entity primitives truthful that readers person a wide thought of what quantities tin beryllium extracted from the pipeline and tin physique carnal intuition astir however deformable objects respond nether grasps."
Huang and her colleagues carried retired a bid of experiments successful real world settings aimed astatine validating the accuracy of Isaac Gym and the DefGraspSim pipeline. Their findings were highly promising, arsenic they suggest that the results achieved connected their simulation level are akin to those achieved successful existent life.
The researchers' insubstantial won the Best Paper Award astatine the Workshop connected Deformable Object Simulation successful Robotics astatine Robotics Science and Systems (RSS) 2021. In addition, different probe groups person already started utilizing the DefGraspSim pipeline to measure their techniques for deformable entity grasping.
"We judge that DefGraspSim is simply a precise practical, all-purpose instrumentality that tin beryllium customized to cod immoderate metric oregon further information that researchers would want," Huang and her colleagues said. "There are galore impactful ways successful which we deliberation our pipeline volition supply a beardown instauration for aboriginal work."
In the future, DefGraspSim could alteration much rigorous and reliable evaluations of tools for robotic entity grasping, arsenic good arsenic comparisons betwixt their show successful simulations and reality. The level could besides beryllium extended to see vision-based measurements, specified arsenic those contiguous successful RGB-D images, oregon to physique grasp planners that tin make optimal grasp strategies based connected entity properties and selected metrics.
"Currently, we are leveraging DefGraspSim to make grasping experimental information of standard for the grooming of heavy networks," the researchers wrote. "We are utilizing DefGraspSim to measurement and make high-dimensional features that volition beryllium utilized successful a deep-learning model for accelerated metric prediction connected unseen objects."
More information: Isabella Huang et al, DefGrapsSim: simulation-based grasping of 3D deformable objects, arXiv:2107.05778 [cs.RO] arxiv.org/abs/2107.05778
© 2021 Science X Network
Citation: DefGraspSim: A pipeline to measure robotic grasping of 3D deformable objects (2021, September 1) retrieved 1 September 2021 from https://techxplore.com/news/2021-09-defgraspsim-pipeline-robotic-grasping-3d.html
This papers is taxable to copyright. Apart from immoderate just dealing for the intent of backstage survey oregon research, no portion whitethorn beryllium reproduced without the written permission. The contented is provided for accusation purposes only.







 English (US) ·
English (US) ·