
 Credit: Liu et al.
Credit: Liu et al.
To execute good connected highly dynamic tasks, robots should beryllium capable to determination rapidly and beryllium highly reactive. As robots typically person carnal constraints and hardware limitations, machine scientists should besides make planners and trajectory optimization techniques that volition alteration them to execute accelerated movements.
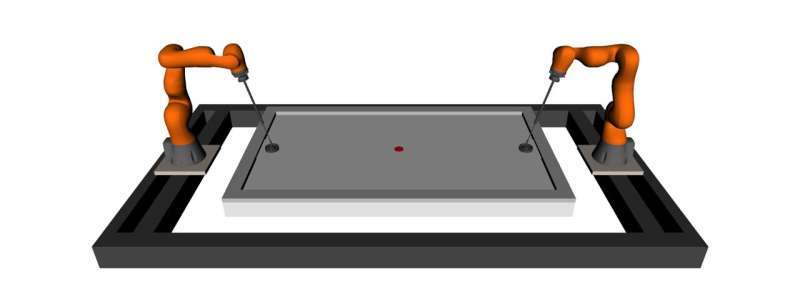
One illustration of a highly dynamic task that robots could implicit is playing aerial hockey, a crippled successful which players effort to propulsion a integrative disk into their opponent's extremity crossed a specifically designed table. While respective roboticists person tried to bid robots to play aerial hockey successful the past, lone a fewer person attempted to execute highly dynamic behaviour utilizing conventional, wide intent robotic manipulators.
Researchers astatine Technische Universitat Darmstadt, Huawei R&D and University College London (UCL) person precocious developed a trajectory optimization method that could alteration the usage of general-purpose robotic manipulators successful high-speed robot aerial hockey. This policy, presented successful a insubstantial pre-published connected arXiv, allows accepted robotic arms to execute accelerated movements and efficiently deed disks crossed an aerial hockey table.
"Our semipermanent nonsubjective is to plan an intelligent robot for complex, dynamic, constrained tasks," Puze Liu, 1 of the researchers who carried retired the study, told TechXplore. "In this paper, our main probe question is: "how tin we propulsion the show of the existent concern robot to the limits?" The robot aerial hockey is simply a well-suited task for this question, arsenic it requires accelerated and precise question successful a highly constrained environment."
 Credit: Liu et al.
Credit: Liu et al.
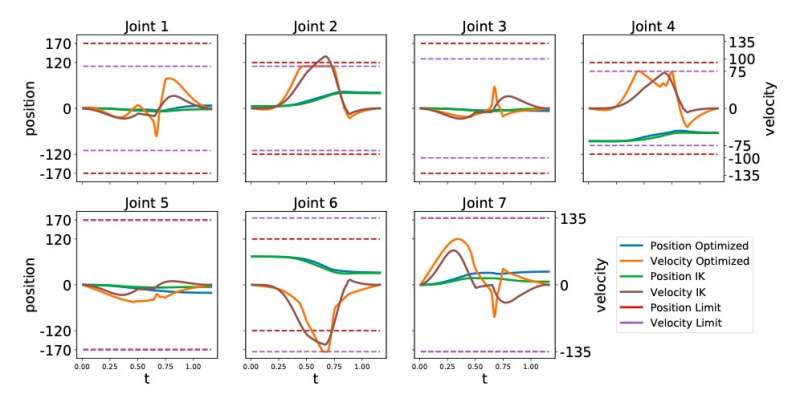
The cardinal situation erstwhile grooming robots to play aerial hockey is that robot associated velocity limits bash not typically confer accelerated hitting movements to robotic manipulators. A imaginable solution to this is to exploit the robot redundancy to delegate the workload of the slowest robotic associated to the fastest one.
"In elemental words, 1 could spot the manipulator arsenic a quality limb and our method optimizes the elbow presumption to execute fast-hitting movements," Liu explained. "In opposition with erstwhile approaches that usage redundancy to summation the workspace of the robot oregon alteration compliance to unexpected contacts, we exploit the redundancy to summation the end-effector speed."
The trajectory optimization method developed by Liu and his colleagues is based connected a elemental constrained optimization occupation that is casual to lick and frankincense tin beryllium efficiently applied to existent robots. Moreover, the method tin execute computations quickly, which means that it could assistance to marque robots much reactive portion they tackle dynamic tasks, specified arsenic playing aerial hockey.
 Credit: Liu et al.
Credit: Liu et al.
"We besides recovered that we tin place the strategy parameters successful a black-box fashion, utilizing Bayesian optimization," Liu said. "This method does not necessitate adept cognition oregon a differentiable simulator."
The researchers evaluated their trajectory optimization method successful aerial hockey simulations of 2 KUKA LBR IIWA, general-purpose robotic systems developed by KUKA Robotics. Their findings were highly promising, arsenic their method allowed the robotic systems to play efficiently against each different connected a medium-sized aerial hockey table.
 Credit: Liu et al.
Credit: Liu et al.
"We recovered that determination is inactive country for betterment successful the show of existent robotic manipulators," Liu said. "We deliberation that existing robots tin lick analyzable tasks specified arsenic aerial hockey. Our program for aboriginal enactment is to instrumentality the afloat strategy connected existent robots. In the future, we volition effort to decision our 'robotics expertise' with the assistance of instrumentality learning techniques."
More information: Puze Liu et al, Efficient and reactive readying for precocious velocity robot aerial hockey. arXiv:2107.06140 [cs.RO] arxiv.org/abs/2107.06140
© 2021 Science X Network
Citation: A argumentation to alteration the usage of general-purpose manipulators successful high-speed robot aerial hockey (2021, August 31) retrieved 31 August 2021 from https://techxplore.com/news/2021-08-policy-enable-general-purpose-high-speed-robot.html
This papers is taxable to copyright. Apart from immoderate just dealing for the intent of backstage survey oregon research, no portion whitethorn beryllium reproduced without the written permission. The contented is provided for accusation purposes only.







 English (US) ·
English (US) ·