
 Different snapshots of the robot pursuing the quality person crossed an situation with assorted static obstacles. The robot remains connected the measured way astatine a harmless region from the quality operator. Credit: Antonucci et al.
Different snapshots of the robot pursuing the quality person crossed an situation with assorted static obstacles. The robot remains connected the measured way astatine a harmless region from the quality operator. Credit: Antonucci et al.
In caller years, machine scientists person developed mobile robots that could beryllium introduced successful a assortment of settings. To efficiently navigate unstructured environments, however, these robots should beryllium capable to program harmless paths to scope their desired destinations.
Existing approaches to program harmless paths for robots autumn into 2 wide categories. The archetypal benignant entrusts the power of the robot wholly to trained quality users, who are expected to show the movements of robots and find their trajectories.
The 2nd benignant of planners are those that effort to bid robots to program their ain paths and determination autonomously. While immoderate of these planners person achieved promising results, they tin beryllium unreliable, peculiarly erstwhile a robot is navigating analyzable environments that are besides populated by humans oregon animals. To execute satisfactory results, these planners typically necessitate costly hardware and sensors.
Researchers astatine University of Trento person precocious developed an alternate framework for robot path planning. This caller framework, presented successful a insubstantial pre-published connected arXiv, allows robots to place and larn harmless paths towards a desired destination simply by pursuing a quality relation walking successful beforehand of them.
"In human-robot interactions wherever a robot has to travel a quality relation by navigating successful unstructured and human-populated enactment environments, information is evidently of superior importance," Alessandro Antonucci, 1 of the researchers who carried retired the study, told Tech Xplore. "The main nonsubjective of our enactment was to delegate the way readying regular of the robot to the human, who indispensable nevertheless ore lone connected the way to take. The robot for its portion is capable to memorize the way traveled and reuse it successful aboriginal missions."
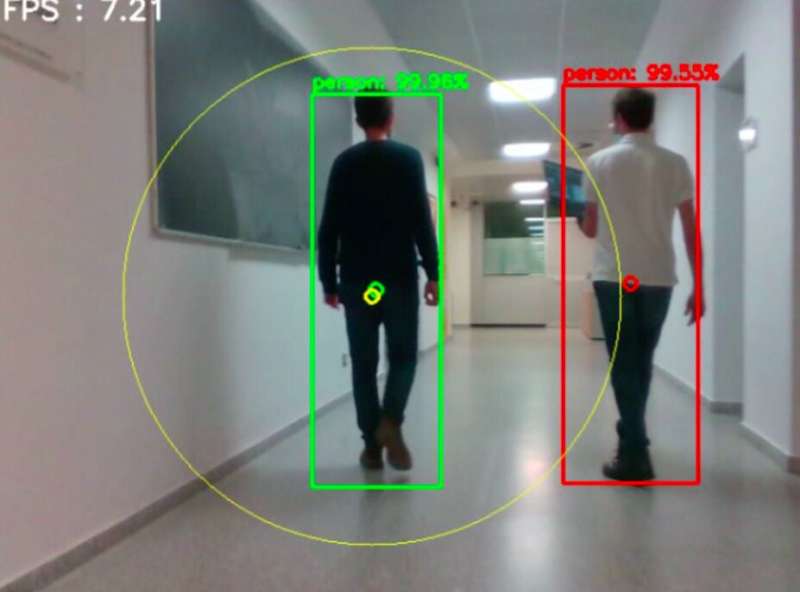 How the robot detects and recognizes its quality person (green box) and different persons (red box) from its onboard camera. Credit: Antonucci et al
How the robot detects and recognizes its quality person (green box) and different persons (red box) from its onboard camera. Credit: Antonucci et al
The attack developed by Antonucci and his colleagues greatly simplifies the task of way planning, frankincense it does not necessitate peculiarly costly sensors oregon highly precocious bundle components. Essentially, the model allows robots to admit a quality 'leader' (or 'path-finder'), to past find and way his movements.
"The peculiar sensor fusion based connected a laser scanner and a extent camera, which is simply a peculiarity of our work, and mounted connected the robot chassis, allows the robot to separate the person from different radical successful its surroundings, frankincense ensuring tracking robustness," Antonucci said. "Moreover, the precocious accuracy of the region of the entities astir the robot ensures its safety, arsenic the robot tin halt successful clip earlier colliding with static obstacles and different people."
The researchers' attack utilizes a operation of state-of-the-art techniques. In addition, their model is highly modular, which means that it tin beryllium adapted, modified and improved by adding oregon removing modules, without changing its wide design.
Antonucci and his colleagues evaluated their model successful a bid of experiments. They recovered that it performed remarkably good contempt its debased complexity and the debased terms of the sensors they used.
In the future, the caller attack devised by this squad of researchers could assistance the improvement of low-cost mobile robots that tin navigate unstructured environments safely and much efficiently. As it does not necessitate costly sensors, hardware and software, the model should beryllium casual to instrumentality successful real-world settings.
"Our adjacent studies volition absorption connected improving the enactment betwixt the robot and the human," Antonucci said. "At present, if the robot notices an obstacle connected its way, it tin lone respect the information and stop. We are reasoning for lawsuit to adhd wearable devices with which the robot tin pass successful beforehand to the quality person that the way that the second has taken is not really due for the robot."
More information: Humans arsenic path-finders for harmless navigation. arXiv:2107.03079 [cs.RO]. arxiv.org/abs/2107.03079
© 2021 Science X Network
Citation: A model for robot way uncovering successful unstructured environments (2021, August 9) retrieved 9 August 2021 from https://techxplore.com/news/2021-08-framework-robot-path-unstructured-environments.html
This papers is taxable to copyright. Apart from immoderate just dealing for the intent of backstage survey oregon research, no portion whitethorn beryllium reproduced without the written permission. The contented is provided for accusation purposes only.







 English (US) ·
English (US) ·